
- Nissan Türkiye, Townstar İle Hafif Ticari Araç Pazarına Girdi
- Türkiye’de Yılın Otomobili İçin Yarışacak 7 Finalist Belli Oldu
- Petlas, Prestige Sport ile Premium Segmentte İddialı
- Türkiye’de Yılın Otomobili Seçiminde 42 Model Yarışacak
- Koçaslanlar’dan Bayram Yolculuğu İçin Önemli Araç Bakım Uyarısı
- Ford Otosan, Ankara Akyurt’ta Yeni Yedek Parça Dağıtım Merkezi Açtı
- Yeni BMW iX 700 km Varan Menzili ve Yenilenen Tasarımıyla Yollarda
- Volkswagen Ticari Araç’ın eHybrid Modeli Multivan Yenilenen Özellikleriyle Satışa Sunuldu
- Volkswagen’in Premium SUV modeli Yeni Tayron Satışa Sunuldu
- Hyundai Motor Türkiye Elektrikli Araç Üretimine Hazırlanıyor
Volvo’dan Geleceğe Bir Adım Daha; 360 Derece Görüş Teknolojisi…
Volvo Cars, çarpışmadan kaçmanın yollarını belirleyen yeni güvenlik özelliğini geliştirerek “2020 yılında yeni bir Volvo otomobilin içerisinde hiç kimse ölmeyecek ya da ciddi şekilde yaralanmayacak” hedefine bir adım daha yaklaştı.
Dört yıldır devam eden “Çarpışma Yaşamayan Otomobil ve Kamyon Projesi”, otomobilin çevresinde 360 derece kusursuz bir görüş sağlayan yeni nesil algılayıcı birleşimi teknolojisinin başarıyla geliştirilmesiyle, Aralık ayında sona ermiş olacak.
Akademi, çeşitli kurumlar ve otomotiv sektörü arasında bir İsveç işbirliği olan “Çarpışma Yaşamayan Otomobil ve Kamyon Projesi”, hem ticari araçlar hem de özel otomobiller için kaza risklerini azaltmaya yönelik yeni teknolojiler geliştirmeyi ve mevcut olanları daha da iyileştirmeyi amaçlıyor.
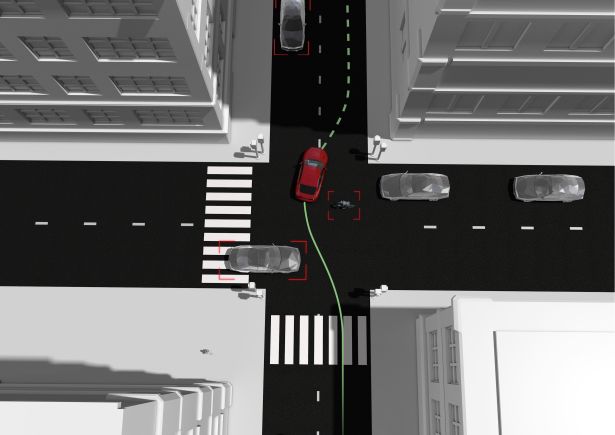
Otomobil çevresinde benzersiz 360 derece görüş – Algılayıcı Birleşimi
Projenin zorluklarından bir tanesi, daha önce başarılmamış bir şeyi gerçekleştirmek, yani otomobilin çevresinde yer alan bir dizi farklı algılayıcıdan tek bir birleştirilmiş algılama sistemi oluşturmaktı. Bu durum, kameralar, radar, lidar, GPS gibi çeşitli teknolojilerin bilgileri verimli bir şekilde paylaşabilmesini sağlayan merkezi bir “Algılayıcı Birleştirme” çatısının geliştirilmesini gerektirdi.
Bu çatı sayesinde sistem, 360 derecelik tam bir çevre görüşü sağlıyor ve sürücülerin başka hiçbir şekilde göremeyecekleri, potansiyel tehdit oluşturan cisimleri algılıyor. Proje, yaşayan otomotiv algılayıcılara odaklanarak, bu yeni teknolojinin yakın gelecekte hayata geçmesi için büyük bir adım atmış oldu.
Çarpışmadan kaçış yolları üretmek – tehdit değerlendirme
360 derece görüş sistemi, bir manevra üretici ile -yani tüm trafik senaryoları için çarpışmadan kaçış yolları belirleyen bir yazılım kullanan yeni bir güvenlik özelliği ile- daha da iyileştirildi. Otomobilin çevresindeki tehditleri sürekli olarak analiz eden sistem, sürücülere otomatik frenleme ve otomatik direksiyon kumandası gibi yardımlarda dahi bulunabiliyor. Proje, 360 derece görüş ve manevra üreticinin birlikte nasıl çalıştığını gösterebilmek için iki ayrı test aracı üretti.
2020 ve sürücüsüz araçlar için bir dönüm noktası
Volvo Cars, Çarpışma Yaşamayan Otomobil Projesi, Proje Müdürü Ander Almevad, “Yenilikçi aktif güvenlik araştırma ve geliştirme konusuna geldiğimiz zaman Volvo Cars kesinlikle en ön sırada yer alıyor. ‘Çarpışma Yaşamayan Otomobil ve Kamyon Projesi’ ile ‘2020 yılında yeni bir Volvo otomobilin içerisinde hiç kimse ölmeyecek ya da ciddi şekilde yaralanmayacak’ vizyonumuzu gerçekleştirmeye yönelik önemli bir adım daha attık. Bu teknoloji, aynı zamanda herhangi bir durumda çarpışmayı önlemek amacıyla otomatik fren yapan ve direksiyonu otomatik olarak kontrol eden sürücüsüz araçların geliştirilmesi için de bir zorunluluk. Aslında bizim öncelikli amacımız farklı tipte kaza senaryolarını önlemeye çalışmak, ancak biz daha da ileri giderek her bireyin farklı davranışlarına göre kendini adapte eden otomobiller geliştirmek için çalışıyoruz” diyor.
Çarpışma Yaşamayan Otomobil ve Kamyon Projesi hakkında
Çarpışma Yaşamayan Otomobil ve Kamyon Projesi, Volvo Cars ve ortakları tarafından Eylül 2010’da başlatılan ve 2014 Aralık ayında sona erecek olan, 80 milyon SEK’lik (İsveç Kronu) bir yatırım. Proje, Volvo Cars’ın ‘2020 yılında yeni bir Volvo otomobilin içerisinde hiç kimse ölmeyecek ya da ciddi şekilde yaralanmayacak’ vizyonunu destekliyor; Hem ticari araçlar hem de özel otomobiller için kaza risklerini azaltmaya yönelik yeni teknolojiler geliştirmeyi amaçlıyor. Proje ortakları arasında: Volvo Cars, AB Volvo, ÅF (algılayıcı birleşimi geliştirme), HiQ (algılayıcı birleşimi geliştirme, tehdit değerlendirme), Mecel (algılayıcı tedariği) ve Chalmers Teknoloji Üniversitesi (algılayıcı birleşimi geliştirme, sürücü adaptasyonu) yer alıyor. Çarpışma Yaşamayan Otomobil ve Kamyon Projesi, “SAFER (Daha Güvenli) Araç ve Trafik Güvenlik Merkezi” ile birlikte yürütülüyor.







0 comments